

Как самолеты следуют за кривизной Земли, физическое моделирование

Автор: Вальтер Бизлин
Симулятор Самолета
Перемещайте ползунки и наблюдайте, как самолет всегда находит новую равновесную высоту. Когда демпфирование тангажа отключено, перемещайте ползунки медленно, чтобы предотвратить колебания. Ускорьте симуляцию до 100 раз с помощью ползунка «Time x». Измените радиус Земли, чтобы увидеть, что самолет автоматически следует кривизне Земли, независимо от ее размера. Установите радиус Земли (EarthRadius) = 100 000 %, чтобы имитировать плоскую Землю. Нажмите «Сбросить позицию» (Reset Pos), чтобы переместить систему координат в положение самолета, чтобы самолет снова стал горизонтальным.
- Управление
- Нач. значения
- Сбросить время
- Сбросить Поз.
- Сбросить всё
- Стоп
Stop the simulation by clicking the Stop button, enter the initial values in the input fields and click Reset All to copy the initial values into the simulation. The simulator calculates all the forces due to this initial values, so you can see wheter they yield in stable states or not. If satisfied with the values, click Run.
Остановите моделирование, нажав кнопку «Стоп«, введите начальные значения в поля ввода и нажмите «Сбросить все«, чтобы скопировать начальные значения в моделирование. Симулятор вычисляет все усилия, обусловленные этими начальными значениями, так что вы можете видеть, поддаются ли они в стабильных состояниях или нет. Если значения вас устраивают, нажмите кнопку Выполнить.
Физическое моделирование
В модели не задано, как она должна реагировать на действия пользователя и условия окружающей среды. В реальной жизни все системы подчиняются основным физическим законам, таким как законы движения Ньютона. Автор запрограммировал в симулятор несколько простых моделей атмосферы, земли и двигателей, физических законов и связей между различными физическими системами и позволил ему рассчитать, как все состояния самолета развиваются в соответствии с этими законами. Это означает, что данная симулятор действует как настоящий самолет, подчиняющийся тем же физическим законам.
Подробные описания используемых моделей, дополнительную информацию и исходный код можно найти здесь:
- Объяснение имитационной модели самолета
- Модель стандартной атмосферы
- Коэффициенты подъемной силы и лобового сопротивления самолета для всего диапазона угла атаки.
- Модель турбореактивного двигателя
- Калькулятор скорости воздуха (калькуляторы и конвертеры единиц)
- Eine Fluggeschwindigkeit, verschiedene Anzeigen (объяснение скоростей воздуха)
- Fluggeschwindigkeiten, IAS, TAS, EAS, CAS, Mach (преобразование скоростей воздуха)
- Исходный код симулятора самолетов
Данная модель имитирует весь диапазон угла атаки и учитывает плотность и сжимаемость воздуха при расчетах тяги.
Графика моделирования
 Примечание. Силы по оси X самолета, т. е. сопротивление и тяга, можно увеличить в 5 раз, поскольку они намного меньше подъемной силы и веса, см. опцию Fx × 5.
Примечание. Силы по оси X самолета, т. е. сопротивление и тяга, можно увеличить в 5 раз, поскольку они намного меньше подъемной силы и веса, см. опцию Fx × 5.
Основной дисплей полета

Демпфирование тангажа
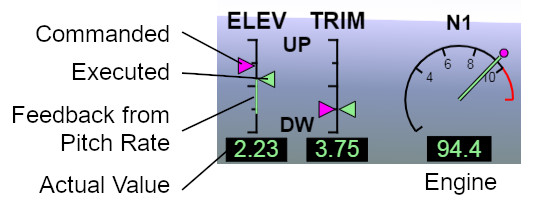
В этом симуляторе реализована функция демпфирование тангажа. Демпфирование тангажа не меняет высоту, к которой стремится самолет, из-за дифферента и настроек двигателя. Он лишь гасит колебания высоты и фугоида.
Демпфирование тангажа работает за счет включения дополнительной петли отрицательной обратной связи на выходе первого интегратора, которая является частью уравнений движения и преобразует ускорения в скорости обратно на свой вход, см. рисунок в разделе «Как работает фугоид ». Он использует скорость тангажа и вертикальную скорость для модуляции отклонения руля высоты. Т.е. он добавляет дополнительный угол отклонения к заданной настройке руля высоты в зависимости от фактической скорости тангажа и вертикальной скорости.
Мы можем наблюдать петлю обратной связи в работе. Пурпурная стрелка на дисплее ELEV показывает заданный угол руля высоты, а зеленая стрелка показывает угол руля высоты, который самолет эффективно устанавливает для предотвращения колебаний. Зеленая вертикальная линия показывает поправку на отклонение, вызванную только скоростью тангажа. Поскольку эта петля обратной связи вызывает в основном лишь очень небольшие отклонения руля высоты, она усиливается и отображается в виде зеленой линии. Разница между заданным и выполняемым углом руля высоты обусловлена всей петлей обратной связи демпфирования, которая включает обратную связь от скорости тангажа и вертикальной скорости.
Принимая во внимание кривизну Земли
Часто в расчетах и симуляциях Земля рассматривается как плоская, чтобы упростить уравнения и расчеты. Данная симуляция не допускает такого упрощения. Она имитирует то, что происходит на земном шаре. Это означает, что вектор гравитации меняет направление и всегда указывает на центр Земли по мере движения самолета вперед. И смоделированная атмосфера повсюду создает вокруг Земли слой с градиентом плотности, перпендикулярным поверхности, как в реальности.
Моделирование позволяет изменять радиус Земли. Ввод очень большого числа, например 100 000 %, по сути, создает плоскую Землю. Значение по умолчанию составляет 5 % от размера реальной Земли, чтобы сделать эффект кривизны намного сильнее и облегчить изучение. В любом случае самолет ведет себя одинаково. Он летит на заданной высоте и остается там, следуя за поверхностью земли, какой бы большой или плоской она ни была.
Обратите внимание, что ускорение в равновесии не равно нулю, а представляет собой определенную величину, направленную к центру Земли. Это центростремительное ускорение, возникающее в результате моделирования и необходимое для того, чтобы самолет следовал кривизне Земли. Это ускорение не запрограммировано в системе. Это естественно вытекает из физики, правильно предсказанной симуляцией. Чем меньший радиус Земли выбран, тем сильнее центростремительное ускорение. Пассажир не чувствует центростремительного ускорения, но чувствует немного меньший вес из-за соответствующего центробежного ускорения. Это изменение ощущения G-Force рассчитывается и отображается на дисплее G-Force.
Давление и Высота
Самолеты измеряют свою высоту, измеряя статическое давление воздуха снаружи самолета. Поскольку давление воздуха предсказуемо снижается с высотой, давление воздуха используется в качестве входных данных для высотомеров. Измеренное давление преобразуется в показания высоты и отображается на высотомере в футах. Изменения высоты определяются по изменениям измеренного давления воздуха или по показаниям вертикальных акселерометров инерциального эталонного устройства (англ.) (IRU) и отображаются на индикаторе вертикальной скорости в футах в минуту.
Ниже высоты перехода (например, 18 000 футов в США и Канаде) пилоты должны ввести давление местного уровня моря, так называемую настройку QNH Altimeter (англ.), поэтому высотомер показывает высоту над уровнем моря, независимо от давления воздуха на это место в настоящее время находится. Они получают QNH от диспетчерской службы воздушного движения (УВД), башни или АТИС.
Выше переходной высоты на всех самолетах установлено стандартное значение QNH 1013,25 гПа или 29,92 дюйма рт. ст. Это означает, что самолет постоянно поднимается и снижается, когда давление воздуха снаружи меняется, чтобы поддерживать запрограммированную барометрическую высоту. Поскольку так поступают все самолеты, гарантировано сохранение вертикального эшелонирования между самолетами. Таким образом, пилотам не придется постоянно корректировать высотомер во время крейсерского полета.
Вы можете смоделировать поведение изменения местного давления воздуха с помощью ползунка ΔP. Вы можете наблюдать, что высота на высотомере меняется по мере изменения местного атмосферного давления, и самолет автоматически снижается или возвращается к балансированной барометрической высоте.
Как самолеты следуют за кривизной Земли
Когда пилоты или системы управления полетом дают команду самолету удерживать определенную высоту, автопилот и Электродистанционная система управления постоянно корректируют настройки триммера и тяги руля высоты для поддержания заданной барометрической высоты и воздушной скорости. Именно так самолеты в реальности удерживают определенную барометрическую высоту и скорость, и с помощью этого механизма самолеты следуют кривизне Земли без вмешательства пилотов.
Но даже при отключении автопилота и системы дистанционного управления самолеты устроены таким образом, что они естественным образом удерживают барометрическую высоту, на которую настроены. Интерактивное физическое моделирование на этой странице показывает, как это работает, отображая все силы, а также векторы скорости и ускорения.
Когда самолет меняет высоту или когда изменяется вертикальная составляющая скорости ветра, возникают аэродинамические силы, действующие на горизонтальный стабилизатор в хвостовой части летательного аппарата, которые создают моменты, отбрасывающие самолет обратно в направлении ветра. Это придает самолету естественную устойчивость. [1] [2] См. также Аэродинамические моменты (  объяснение имитационной модели самолета).
объяснение имитационной модели самолета).
Фугоид
Фугоид — это движение самолета, при котором транспортное средство поднимается вверх и поднимается, а затем наклоняется и опускается, сопровождаясь ускорением и замедлением по мере движения «под гору» и «в гору». Это один из основных режимов динамики полета самолета и классический пример системы отрицательной обратной связи. [3]
Эти колебания обычно предотвращаются системой автопилота. В данной симуляции любое колебание высоты тона можно заглушить, включив демпфирование тангажа. Отключив демпфирование высоты тона, можно наблюдать и изучать Фугоида. Если автопилот самолета выключен, у него нет активной электродистанционной системы и пилот не делает никаких управляющих воздействий, он будет следовать фугоидным колебаниям.
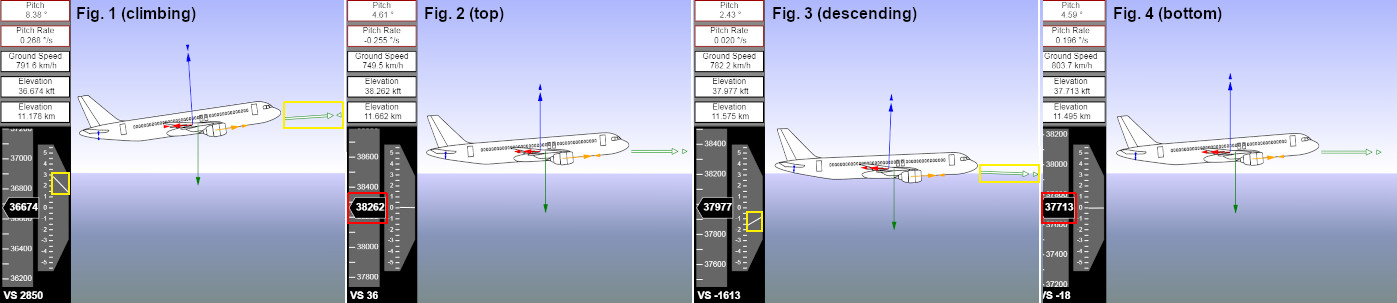 Фугоидные фазы
Фугоидные фазыРис. 1 (набор высоты): Увеличение угла триммера руля высоты вызвало тангаж вверх и, следовательно, увеличение угла атаки и, следовательно, увеличение подъемной силы, которая заставляет самолет набирать высоту. При наборе высоты плотность воздуха уменьшается, самолет теряет скорость, и, следовательно, подъемная сила уменьшается до тех пор, пока не станет меньше веса. Скорость уменьшается, потому что кинетическая энергия преобразуется в потенциальную, как при движении тележки в гору.
Рис. 2 (вверху): Подъемная сила теперь меньше веса, поэтому самолет перестает набирать высоту и начинает наклоняться вниз.
Рис. 3 (по убыванию): Самолет снижается, плотность воздуха увеличивается, скорость увеличивается и, следовательно, подъемная сила увеличивается до тех пор, пока не станет больше веса. Затем самолет перестает снижаться.
Рис. 4 (внизу): Самолет прекратил снижение, поскольку подъемная сила теперь превышает вес. Самолет достиг минимальной высоты Фугоида и снова начинает набирать высоту. Весь цикл повторяется несколько раз.
Одно колебание занимает примерно одну-две минуты. Максимальная и минимальная высота колебаний Фугоида медленно приближаются к средней высоте между ними, новой равновесной высотой по давлению для текущих настроек триммера и тяги руля высоты.
Самолет всегда наклоняется в направлении траектории полета (зеленая стрелка), сохраняя постоянный угол атаки. Угол атаки зависит от настройки триммера руля высоты и положения центра тяжести (ЦТ).
Пилотам не нужно опускать нос, чтобы следовать кривизне Земли. Самолеты спроектированы так, чтобы делать это автоматически, даже без вмешательства пилота или автопилота.
Как работает Фугоид
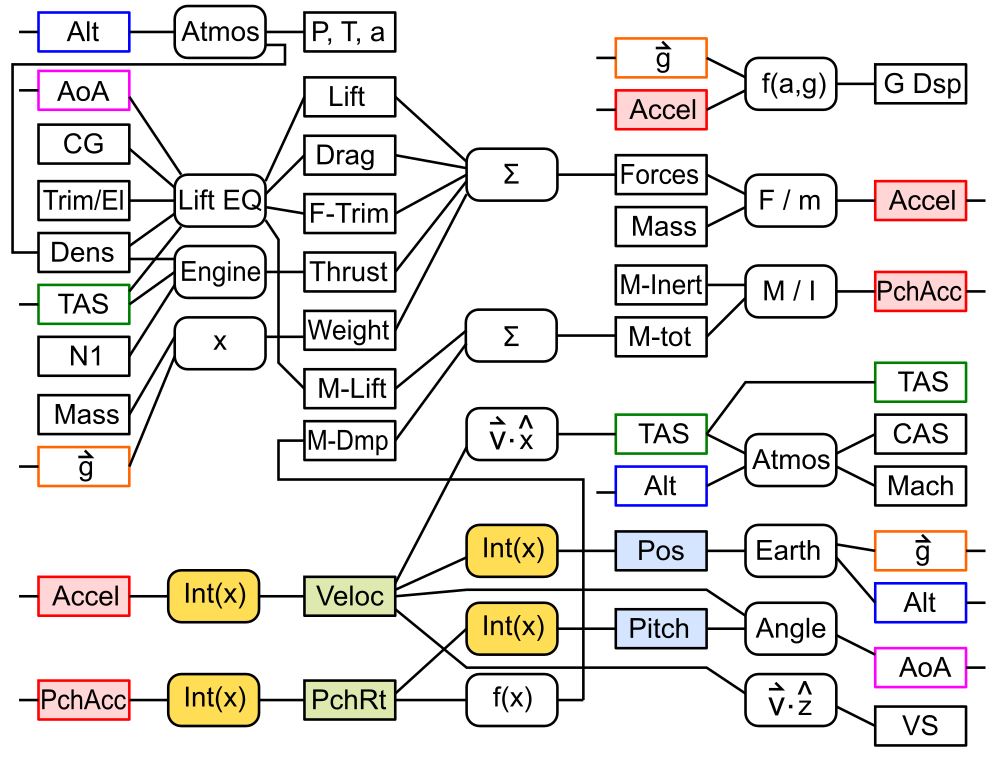
Фугоид – затухающие колебания. Мы можем изучить схему контура управления простого затухающего гармонического генератора, такого как одномерная система масса-пружина, и поискать сходство со схемой контура управления самолета. Хотя контуры управления симуляцией (и реальным самолетом) намного сложнее и не только одномерные, см. « Объяснение модели моделирования самолета», есть некоторые общие черты:
Они оба имеют 2 ступени интеграторов Int(x), от ускорения Accel до скорости Veloc, от скорости до позиции X/Alt, и 2 петли отрицательной обратной связи, одну от скорости Veloc обратно на вход первого интегратора, а другую от позиции X/Alt обратно к первому интегратору. Внешний контур отвечает за колебания, внутренний контур — за затухание колебаний. Это можно получить, найдя дифференциальное уравнение системы и решив его, что выходит за рамки данной статьи.

Хотя на нижней диаграмме показана лишь очень упрощенная версия контуров управления самолетом, где объединены 2 измерения (x,z) в 1 измерение (z), я все же можно объяснить, как Фугоид в принципе работает с этой моделью.
С увеличением высоты подъемная сила уменьшается, а с уменьшением высоты подъемная сила увеличивается, поскольку подъемная сила зависит от плотности воздуха, которая зависит от высоты. Эта отрицательная внешняя обратная связь вызывает вертикальные колебания Фугоида, подобно колебаниям системы масса-пружина. С другой стороны, с увеличением скорости создаваемая тяга двигателя уменьшается, и наоборот. Эта отрицательная внутренняя петля обратной связи гасит колебания Фугоида.
В моделировании мы можем наблюдать фугоидные колебания и то, как вектор ускорения вращается вокруг самолета, что представляет собой двумерное связанное колебание из-за сложного взаимодействия сил и систем самолета. Вектор ускорения вращается, потому что компоненты X и Z сдвинуты по фазе на 90 °, поскольку компонент X проходит только через один интегратор (внутренний контур обратной связи), а компонент Z проходит через два интегратора (внешний контур обратной связи). Каждый интегратор сдвигает фазу синуса колебаний на 90°.
Угол гроба (аэродинамический потолок или угол Q)
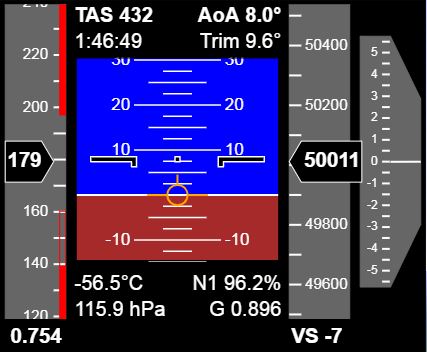 PFD самолета в углу гроба
PFD самолета в углу гробаСуществуют и другие ограничения, которые не позволяют самолетам летать выше определенной высоты потолка.
- Структурные напряжения из-за превышения скорости
- Отделение воздушного потока над крылом из-за местного воздушного потока, близкого к скорости звука или превышающего его, что приводит к потере подъемной силы.
- Минимальная скорость для создания достаточной подъемной силы для противодействия весу
- Минимальная скорость, позволяющая маневрировать без сваливания
- Максимальный угол атаки для создания подъемной силы и предотвращения сваливания
Чем выше летит самолет, тем менее плотный воздух. Чтобы создать необходимую подъемную силу, самолет должен двигаться гораздо быстрее в менее плотном воздухе на больших высотах. Но это значит, что на некоторой высоте она приближается к скорости звука, которая с увеличением высоты даже уменьшается. Таким образом, скорость звука устанавливает верхний предел, на котором может летать самолет. Скорость самолета в данной симуляции ограничена 0,82 Маха. Если скорость станет выше, подъемная сила потеряется и произойдет сваливание (сваливание не реализовано в данной модели).
Предел Маха уменьшается с высотой, потому что плотность и температура воздуха уменьшаются с высотой. Предел числа Маха может приближаться к минимальной калиброванной воздушной скорости (CAS), необходимой для маневрирования и предотвращения сваливания.
Таким образом, на очень больших высотах самолет не может двигаться ни быстрее, ни медленнее, чтобы не свалиться. Это называется Углом Гроба. Обратите внимание, что не мощность двигателя является ограничивающим фактором.
Вы можете смоделировать Угол гроба, задав в симуляции следующие параметры: Трим = 81%, Тяга = 97%, Масса = 56,5т. Увеличивайте угол триммирования постепенно. В этом случае запаса по скоростному режиму практически нет. Вы находитесь в углу, где больше не можете маневрировать.
Ограничения скорости зависят от веса самолета. Пределы отображаются на ленте скорости в виде красных полос. Верхняя полоса показывает максимальный CAS, разрешенный для работы в пределах пределов напряжения, или максимальный CAS для предела Маха, в зависимости от того, что меньше. Нижняя заполненная полоса показывает минимальное значение CAS, при котором самолёт не сваливается, а красная полоса показывает минимальную скорость маневрирования, скорость, при которой можно совершать повороты без сваливания.
Изображение основного дисплея полета (PFD) справа показывает, как для пилота выглядит полет в углу гроба.
Дисплей G-Force
Измеритель G в нижней правой части PFD показывает значения меньше 1 в равновесном полете из-за центробежного ускорения вверх, от центра Земли, вызванного движением по изогнутой вниз земной поверхности.
Некоторые самолеты имеют дисплей G-Force, который в действительности показывает значение меньше 1, что доказывает, что самолет следует кривизне Земли. В зависимости от направления полета на восток или запад это значение различается из-за вращения Земли, точно так, как предсказывает модель земного шара. См. «Центробежное и гравитационное ускорение в самолете», где описан эксперимент, выполненный пилотом Wolfie6020.

 Отображение G-Force из кабины Bombardier Global Express в горизонтальном полете, значение g rel = 0,99
Отображение G-Force из кабины Bombardier Global Express в горизонтальном полете, значение g rel = 0,99В моделировании это значение зависит от выбранного размера Земли. Чем меньше Земля, тем больше кривизна, тем меньше значение G. Если вы установите очень большой радиус Земли ( 100 000 % ), то кривизна станет почти нулевой и на дисплее появится G 1,00. См. Измеритель G-Force, чтобы узнать, как рассчитывается G-Force.
Примечание. Центробежное ускорение и соответствующее значение G не запрограммированы в симуляторе. Они естественным образом возникают из запрограммированных физических законов.
Рекомендации
Стабильность по тангажу означает, что когда нос поднимается вверх, аэродинамика заставляет нос снова опускаться вниз. Мы посмотрим, как расположить крыло и хвост, чтобы это произошло.
https://www.youtube.com/watch?v=1bQT9YUvtkw&t=11s
Глава 7: Введение в устойчивость и управление самолетом
https://research.iaun.ac.ir/pd/ekianpour/pdfs/UploadFile_9029.pdf
Самолет был нарисован Уолтером Бислином с использованием Inkscape, сохранен в формате SVG, а затем преобразован в графические вызовы, используемые этим приложением, с SVG в Jpg.
Похожие публикации:
 Космический туалет на МКС — как космонавты ходят в туалет (видео)
Космический туалет на МКС — как космонавты ходят в туалет (видео)
 Окей, Google: Как космонавты попадают на МКС (видео)
Окей, Google: Как космонавты попадают на МКС (видео)
 Замена КТО в туалете — как ходят в туалет в космосе (видео)
Замена КТО в туалете — как ходят в туалет в космосе (видео)
 Завтрак перед ВКД — как питаются космонавты (обновлённая версия в HD качестве) (видео)
Завтрак перед ВКД — как питаются космонавты (обновлённая версия в HD качестве) (видео)
 Как самому подстричься на МКС? //Быт на Международной Космической Станции// (видео)
Как самому подстричься на МКС? //Быт на Международной Космической Станции// (видео)
 Как происходят съёмки репортажей на Международной космической станции (видео)
Как происходят съёмки репортажей на Международной космической станции (видео)


TikTok: tiktok.com/@olegmks
ВКонтакте: vk.com/olegmks
YouTube: youtube.com/c/OlegMKS
Яндекс.Дзен: zen.yandex.ru/olegmks
RuTube: rutube.ru/channel/23320330/